
40523102
主要運用概念

鋼球大小直徑要求為 9mm,並且參考老師提供的影片,組員之間互相討論,選擇一組機構當作參考進行分工。
也可以觀看參考影片:
https://www.youtube.com/watch?v=JcjSIvs-lEk
一、前言
各組員練習所分配到的 OnShape 影片,並拍攝成練習影片,各組員在第九週後,按照課程進度,完成 Fossil SCM 網誌的更新,並提供個人製作過程的心得。
經過小組成員的討論後,決定先做出共用的提球機構,各成員再製作各自的運輸軌道,並且調整至每個軌道都可以替換。
使用 Github 建立小組的協同倉儲,進行多人分工,以達 到整合的目的,組員之間可以利用各自的時間,完成各自的 工作,並上傳到 Github 上,使組員之間能夠在任何地方看到 組員上傳後的負責項目。
二、摘要
※成品須能放入郵局Box2(23*18*19(cm))的紙箱中。
小組中五位成員各自製作個人小鋼球運輸軌道,必須適用在小組的鋼球提球機構,並且尺寸符合規範。
鋼球提球機構使用 3D 印表機印出,將機構組裝完成,並且完成抬球循環運作。
三、內文
(一)運用上述主要概念,準備進入模擬系統進行模擬,而著實前置作業:

在 solvespace 中繪製四連趕機構,並且模擬轉動情形。

(二)提球部分設計概念:
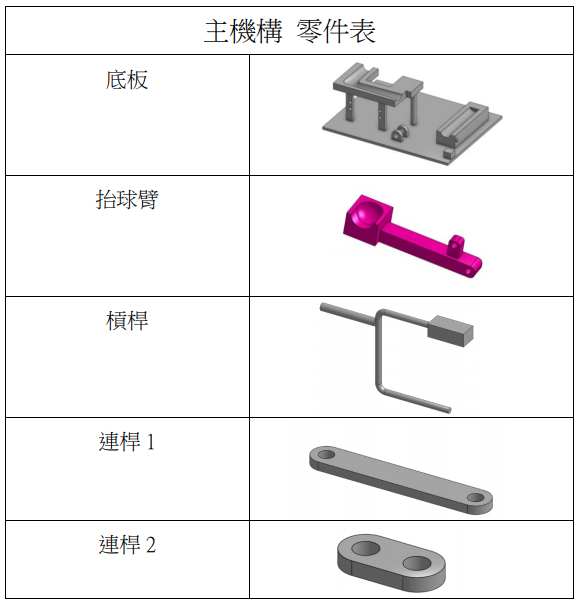
在前端擋球的部份,我們採用槓桿原理的方式製作。
使其在不受任何外力作用下,重端會輕觸於底板,輕端則會懸浮於空中並且擋住出球口,但在抬球臂放下時將輕端往下壓, 重端會往上抬,做到槓桿原理,使球可以自然滾出到抬球臂上的凹槽,完成抬球運動。

(三)零件表
(四)組合完成圖

(五)模擬開始
開始進行 V-rep 中的模擬,隨後並遇上困難。
有時會遇到在斜面中,但是球卻往反方向滾動,或者球在原地,而不是往低處滾動。
抬球臂無法預期的將球送至上軌道,而是把球拍走或是在空中滑落。

上圖為進行轉動馬達的模擬過程。
四、報告成果展示
最後在 3D 列印出實體後,進行實際的組裝。
學校 3D 列印機無法印出 1mm 左右的槓桿,在組裝中,我們使用鐵絲凹出擋球的槓桿,以及使用熱溶膠當作重端,底板則是用木板來代替,以及軌道的斜面則是用鐵絲來凹出的斜面來取代。
在接合部份我們使用熱溶膠當作固定的方式,連接的部分則是用螺絲和螺帽墊上華司當作旋轉接頭。
Last updated