
作業內容
詳細介紹內容
首先,必須從Onshape著手將此兩段式六連桿機構繪出,本組對Week11所製作的三段式六連桿機構進行改動,做出成品。

接下來,開始對負責抬起球的兩個桿(最左及最上桿)進行改動。
由左方的紅色三角型桿件開始:
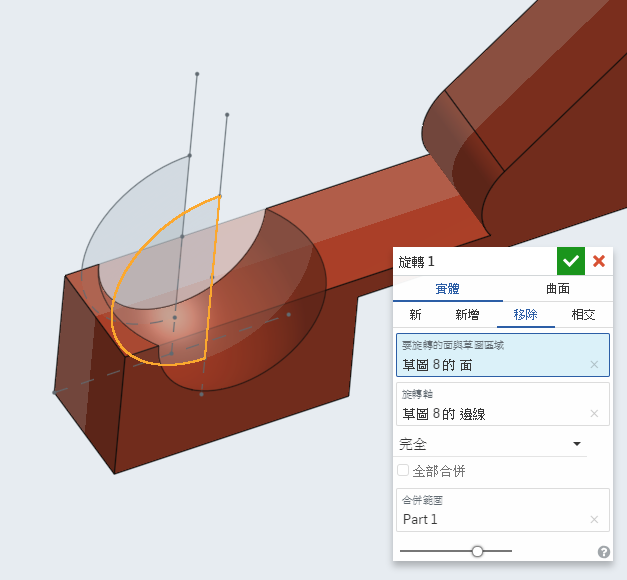
此切除面為接球面,為了不讓球從前後方向落出,把此面切成球型(尺寸為9mm)。
在此之前試過許多不同種接球方法,進行模擬後才得出必須利用球型來接球的結果。
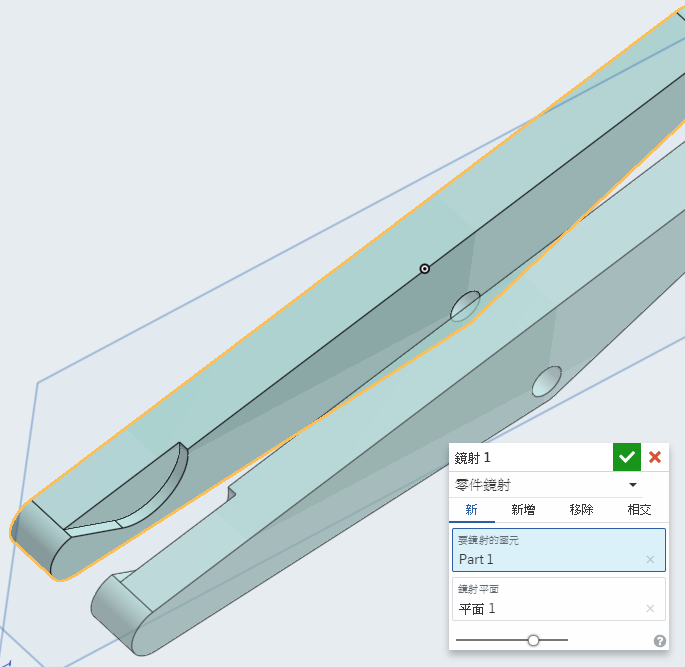
接著進行最上方桿件的改動:

將其挖出一個單邊的凹槽,為了將紅色桿件的球接至此位置,挖出後再將整個桿件鏡射。
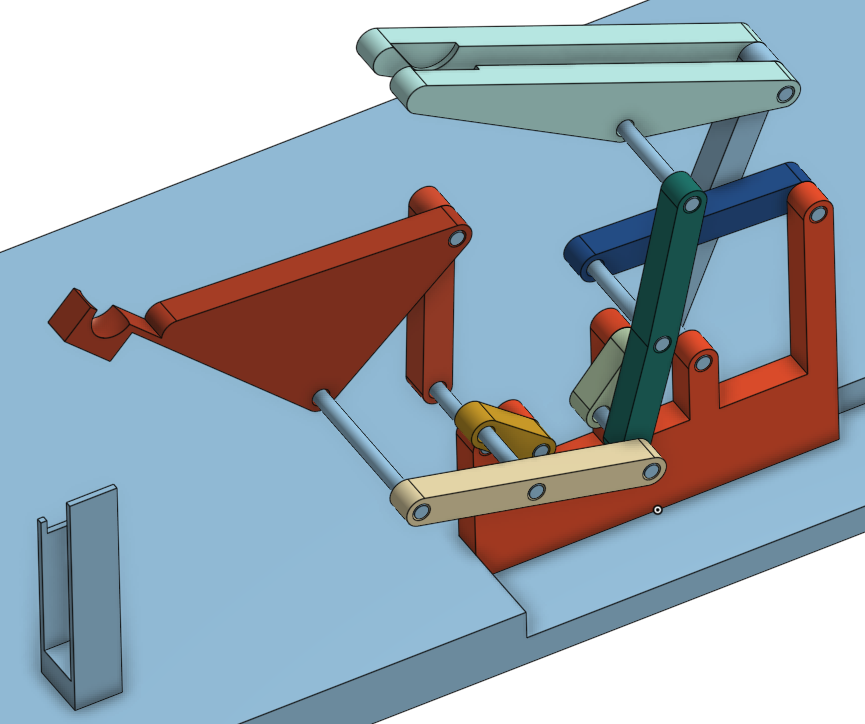
完成接球部分的改動後,開始構想接球處如何擋球,在一直不停運行的連桿機構下,必須讓球在左方定點固定進行等待,機構才能將球撈起,因此設計定點擋球是此機構的重點部位。
經過多次進入V-rep模擬後,繪製出一個極為簡單的擋球裝置。
在最後將把球以此種(右圖)方式固定在接球的位置。


完成後將大致位置擺好及進行需要的約束後,對主動軸(接馬達之軸)進行動態模擬,若沒有出現干涉報告,則表示能進行下一步驟。

將V-rep開啟,匯入連桿,並將其分解,獲得許多零件檔。

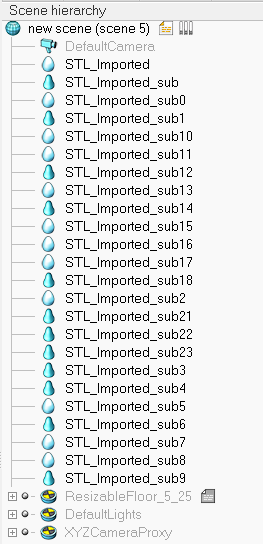
接著開始對每個轉軸加工,點選空白處右鍵來新增模擬轉軸。
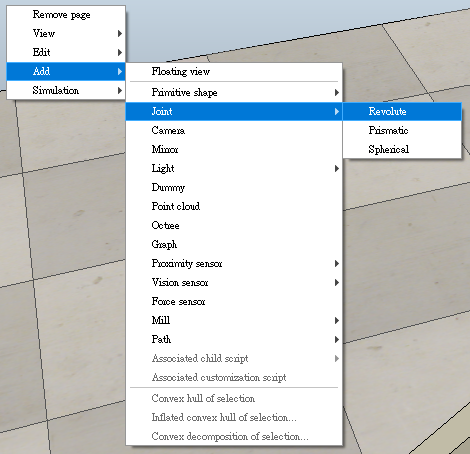

對每個轉軸的處理程序大致為:
1.將轉軸定位至需要位置
2.由左方零件列將轉軸拖曳至連接的桿件下方
3.視情況設定轉軸轉速及最大扭力
其中第一個步驟的定位方法:
點一下需移動的轉軸,接著按住Shift不放,再點要移動至的位置(銷),則轉軸會呈現黃色立方體框框,再按下互相定位即可。
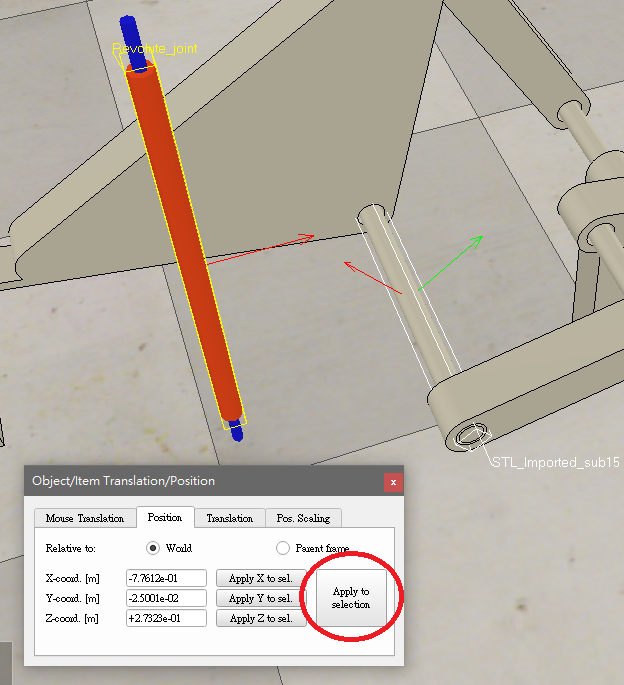

定位好後視情況再將角度也進行互相配合,如下圖。

接著依照個人要求,也可以將轉軸的直徑及長度進行更改,就這樣把所有轉軸都定位。

接著針對模擬部分進行調整,對轉軸及桿件的模擬重點,大致為以下幾點:
1.由底座開始向上逐一設定桿件及轉軸
2.經過觀察放置好左方的零件列
3.有重複連接的部分需利用Dummy來處理
4.基本上只需要一個轉軸設定轉速及扭力
對於轉軸及桿件的連接,以下圖為例子,由底座開始往上延1~5的順序接出。
圖片表達若不夠清楚,可以直接下載ttt檔案來仔細觀看。

而在上圖第5個桿件之後,就必須利用Dummy來完成與其他從底座接上來的桿的連接,同樣必須由操作者觀察,將兩個Dummy連接正確,模擬才會成功。
右鍵空白處,與轉軸相同,即可叫出Dummy出來,注意一組連接就需要兩個Dummy。


而在模擬中必定會有不只一組Dummy的連接,操作者須仔細觀察想要達成的旋轉模擬目標,來進行正確的Dummy連接。
詳細連接可以下載此模擬ttt檔案來觀察。
在模擬成功之後,開始繪製將球運回接球點的軌道。
需要用到3D草圖的地方,在Onshape中不好處理,因此開啟我們的好夥伴—Inventor。
此為最後完成的軌道。

 做出完成品前經過多次細微的修改,也試過非常多種版本。
做出完成品前經過多次細微的修改,也試過非常多種版本。
最後將軌道放進V-rep中模擬,成功做成鋼球循環系統。
 模擬影片:https://www.youtube.com/watch?v=dfAdKo0J35I&feature=youtu.be
模擬影片:https://www.youtube.com/watch?v=dfAdKo0J35I&feature=youtu.be
Last updated